

杏彩体育官网入口网址·六自由度运动平台的三维建模和运动仿真分析(下)
来源:杏彩体育官网网址 作者:杏彩体育官网入口2024-05-10 06:31:56
杏彩体育官网入口网址·
软件自带的运动仿真插件,依托其强大的运动分析功能,能精确地对六自由度平台进行运动位置及运动参数的计算,并以动画的形式演示出来。六自由度平台的虚拟样机模型建立完成后,即可创建运动算例,利用
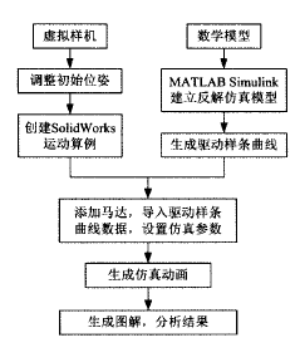
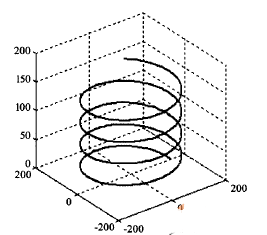
设定平台初始杆长为1lOOmm,此时上下铰点间的垂直距离为1009.52mm。以上平台做螺旋运动为例,螺旋线方程如下:
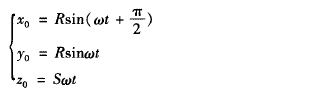
设其半径R=150mm,角速度ω=π/6,导程S=6mm(在MATLAB中绘制出螺旋线所示),仿线s。在MAT—LAB Simulink中建立平台位置反解仿真模型,将上述数据导人模型中,经反解计算得到6个驱动杆的伸缩量,将其保存为.CSV格式,绘制出各驱动杆的驱动样条曲线所示)。
在已搭建好的平台装配体中创建运动算例,选择Motion分析,为每个驱动杆添加线性马达,运动类型中选择数据点,依次将保存好的驱动杆伸缩量导入到对应的马达中,拖动时间键码到50s位置,选择计算后模型开始运动仿真。
仿真结束后单击“结果和图解”,选择查看上平台质心的运动轨迹曲线,以及上平台质量中心在X,Y,Z方向上的结果分量曲线。可以看出上平台作螺旋线运动,通过比对轨迹数据,与上图的螺旋线完全一致。三条上平台质量中心位置分量曲线也与上面所给出的函数所对应的曲线完全一致。
同时,在仿真过程中也未检测到零件干涉、超工作空间等异常情况,证明了模型设计的合理性以及将虚拟样机的参数复用到物理样机上的可行性。
杏彩体育(中国).官网入口网址是国内专业的伺服电动缸厂家,杏彩体育官网入口网址主要经营伺服电动缸、伺服电缸、高精度电动缸、直连式电动缸、并联式电动缸等设备,种类型号齐全。同时汇聚电动缸行业优秀人才,产品广泛应用于汽车、模具、航空航天等行业。
咨询热线:13905180521

